Research



Intelligently designed system inputs have been used successfully to limit vibration of flexible systems. Much of this work has focused on applying properly designed commands to existing systems, which often include pre-designed feedback controllers. We are seeking to extend the state-of-the-art of command generation in several key directions, the primary of which is utilizing command generation principles to pursue more energy efficient controllers.
Millions of complex machines are controlled by human operators. However, the interaction between these operators, the control system, and the user-interface is poorly understood. New designs resulting from improved understanding of these interactions could have an enormous positive economic impact. Toward this end, a major research objective is the exploration of the cognitive processes of human operators, with the goal of establishing known principles to be used during a concurrent controller and user-interface design process.
Other research interests include mobile robotics, rescue robotics, and sensor fusion and processing.
We pursue this research while maintaining a code of conduct that promotes a research environment that is inclusive and respectful to all. For more information, see the C.R.A.W.LAB Code of Conduct page on this site.
Current Projects




Past Projects
- Making the Anaconda Autonomous, in partnership with Swiftships
- Energy Efficient Crane Design
- Mapping Crane Workspaces with Machine Vision
- Automating Pharmaceutical Tube Extraction
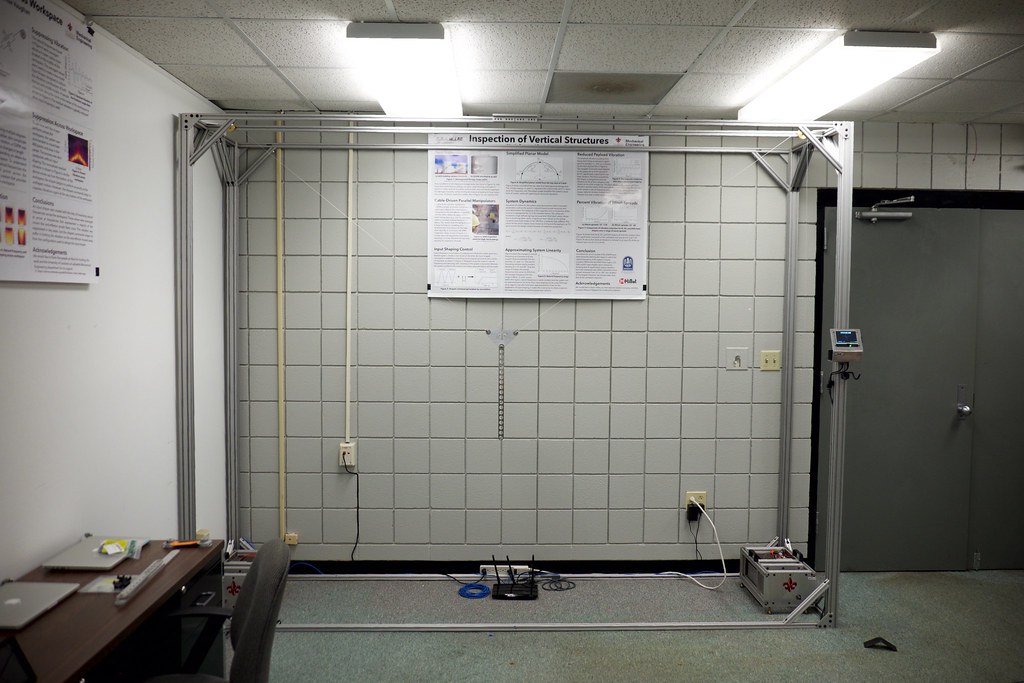
- Limiting Vibration in Cable Riding Robots
We've had the opportunity to work with some excellent collaborators on some exciting projects in the past. Below is some of that work.
At Georgia Tech
Bridge Crane ControlControlling Multimode Crane Oscillation
Controlling Multiple Crane Hoist Cranes
Multiple Crane Hoist Cranes
At Tokyo Tech
Humanitarian Demining RobotTerrain Mapping with Machine Vision
Additional Information
Links
Misc. Presentations
- 02/20/17 — EECE Senior Seminar